
Mal


4020 Barkirin û dakêşana gantry ya dualî ya robotîk
Pêşandana Berhemê


Parametreyên teknîkî yên alavan
| Mezinahiya herî zêde ya plakaya barkirin û dakêşanê | 4000*2000 | mm |
| Mezinahiya herî kêm a plakaya barkirin û dakêşanê | 1500*1000 | mm |
| Qalindahiya plakaya barkirin û dakêşanê ya herî zêde | 50 | mm |
| Qalindahiya plakaya barkirin û dakêşanê ya herî kêm | 0.8 | mm |
| Giraniya herî zêde ya plakaya barkirin û dakêşanê | 3000 | kg |
| Giraniya barkirina yek qatî ya vagona materyalê guheztinê | 6 | T |
| Bilindahiya barkirina yek-qatî ya vagona materyalê danûstandinê | 200 | mm |
| Leza wergerandina milê mekanîkî | 10-30 | m/deqîqe |
| Leza rakirina milê mekanîkî | 5-10 | m/deqîqe |
| Leza guhertina wesayîta materyalê elektrîkê | 10 | m/deqîqe |
| Hêza alavan | 10 | Kw |
| Lûleya têketina hewayê ya alavan | 12 | mm |
| Çavkaniya hewayê ya amûran | 0.6-0.7 | Mpa |
| Pêdiviyên Hêzê | 3-qonax 5-tel 380V |
|
Vîdyoya Makîneyê
Lîsteya mîhengkirina pêkhateyên sereke yên alavan
| Xwarinên lezok | Nav | Nîşan | Bingotin |
| 1 | Rêbera xêzikî ya rakirinê | Taywan HIWIN an Japonya SMG |
|
| 2 | Rakirina slayta xêzikî | Taywan HIWIN an Japonya SMG |
|
| 3 | Navrûya mirov-makîneyê ya ekrana destavê | Şanghayê Flexem |
|
| 4 | Kontrolkera Valahîyê | Taywan KITA an SNS |
|
| 5 | Rêbera xêzikî ya wergerandinê | Taywan HIWIN an Japonya SMG |
|
| 6 | Sliderê xêzikî wergerîne | Taywan HIWIN an Japonya SMG |
|
| 7 | Kontrolkera CNC | Japonya OMRON |
|
| 8 | Dabînkirina Hêzê ya DC | Japonya OMRON |
|
| 9 | Rele | Japonya OMRON |
|
| 10 | Kasa mîzkirinê | REZES |
|
| 11 | Parçeyên pneumatîk | Taywan AIRTAC an SNS |
|
| 12 | Motora Servo | Raynen | Cureyê bêçalakiya mezin |
| 13 | Kêmkerê rastîn | Shanghai YINTONG an Hangzhou KAXIELI | 8 deqîqeyên arc |
| 14 | Hilgirên gerok | Bearingên C&U | Bêparastin |
| 15 | Sensorên Fotoelektrîkî | CHIIB | Rêzeya CHIIB |
| 16 | Şikestin | Schneider | Delixi |
4020 Çareseriya Teknîkî ya Barkirina û Dakêşana Gantry ya Dualî ya Robotîk
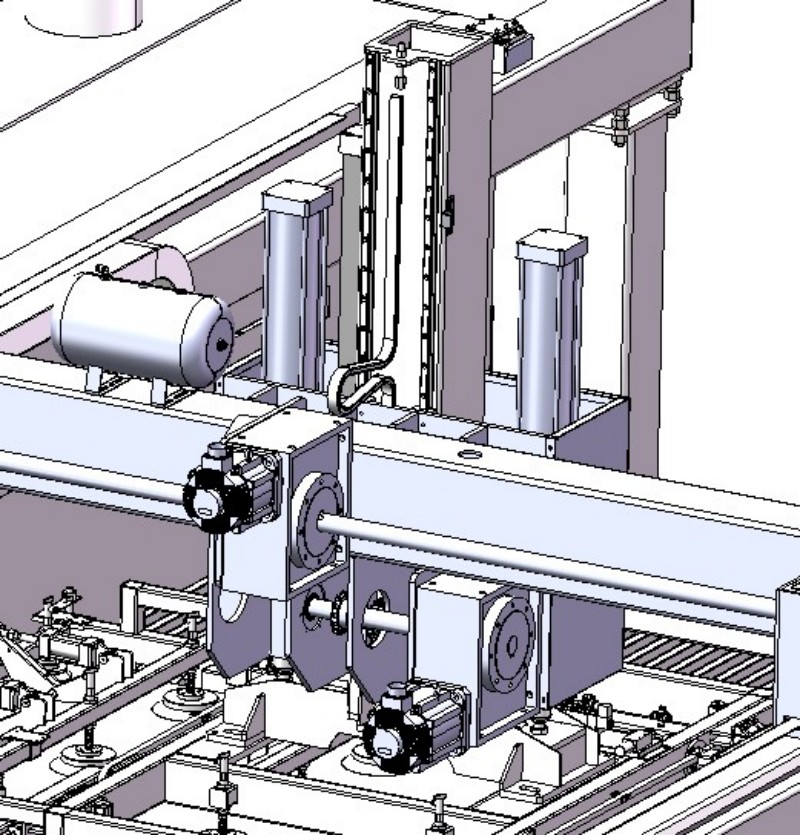
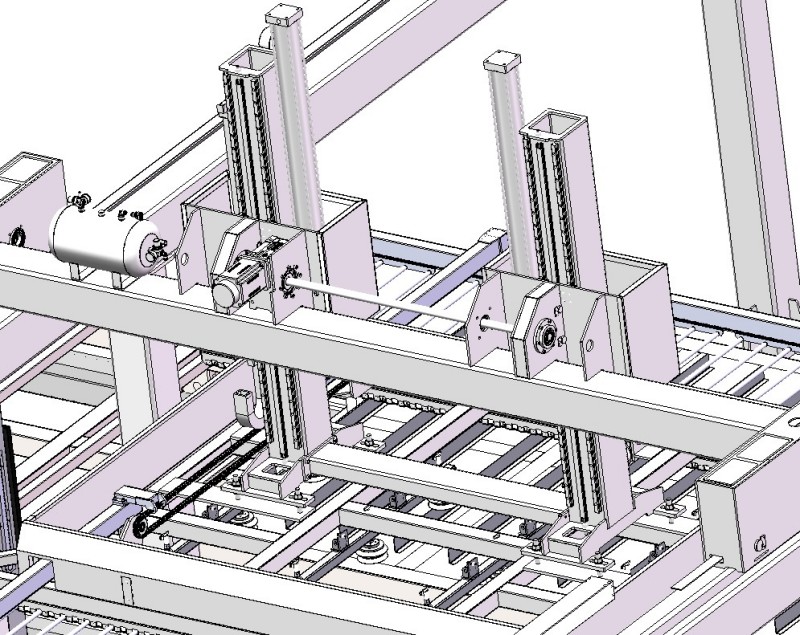
1. Manîpulator ji hêla motorek servo ve bi rêya kêmkerek rastîn ve tê ajotin, bi tevgera rakirinê ya tevahî 700 mm û rêwîtiya alîgir a 4500 mm (li gorî şert û mercên rastîn tê sererast kirin)
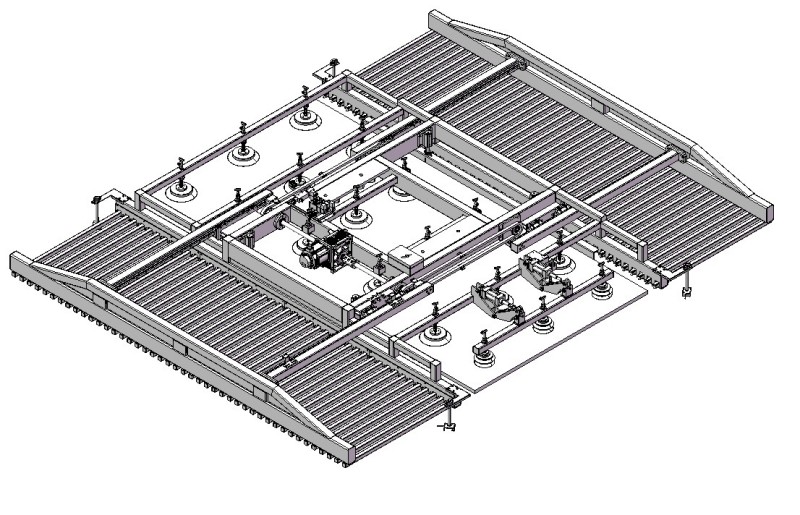
٢. Gelek setên tasên vakûmê yên li hember rûnê berxwedêr ên valahiyê hatine sazkirin, her set tasên vakûmê bi valfek destî ve hatî sazkirin, ku dikare bi destan were girtin û li gorî mezinahiya plakayê were sererast kirin. Rastbûna pozîsyona dubarekirî ya robota xwarinê ± ٢ mm ye.
3. Serî bi amûrek veqetandina plakaya pneumatîk ve hatîye stendin da ku veqetandina plakayan di dema xwarina otomatîk de hêsan bike. Nîşe: Ji ber hêzên adsorpsiyonê yên cûda û naveroka rûnê di navbera plakayan de, ne garantî ye ku plaka bi tevahî bi serkeftî werin veqetandin. Veqetandina bi alîkariya destan dikare li gorî şert û mercên rastîn were kirin.
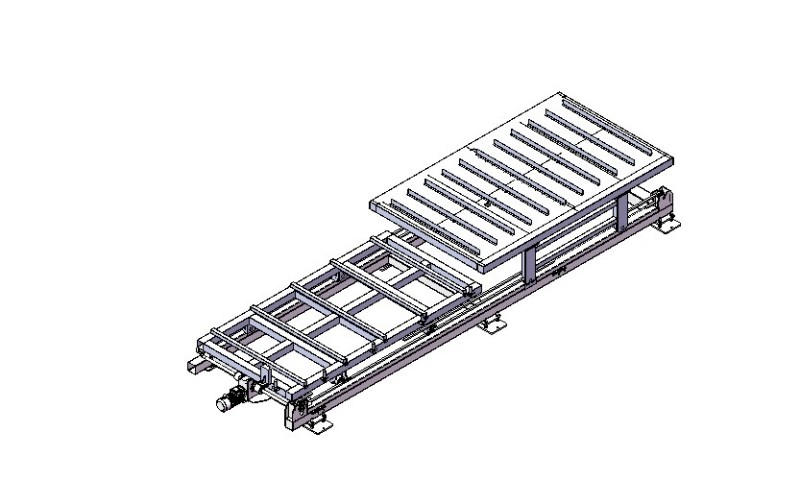
4. Barkirin û daxistina otomatîk bi 1 erebeya materyalê ya elektrîkê ya duqatî (qata jorîn) ji bo makîneya lazerê ji bo hilanîna çarçoveya bermayiyên makîneya materyalê ya qedandî piştî birînê, û 1 erebeya materyalê ya elektrîkê (qata jêrîn) ji bo makîneya lazerê ji bo dabînkirina madeyên xav ve hatî sazkirin.
5. Kamyona materyalan ji hêla motorek hêdîkirinê ve tê ajotin û bi amûrek frena elektromanyetîk ve tê sazkirin. Bi veqetandinek magnetîkî ya guhêrbar ve hatî sazkirin, ew ji bo parçekirina alîkar hêsan e ku panelê adsorb bike û rêjeya serkeftina parçekirinê zêde bike.
6. Dakêşandin bi karanîna manipulatorek dakêşanê ya du-çatal û kasa mîzkirinê ya barkirinê ku bi heman avahiya stûna hildanê ve girêdayî ne, tê bikar anîn. Rêbaza dakêşanê bi avahiyek du-çatal a çep û rast e, çala dakêşanê mesafeya ajotinê kurt e û rêjeya têkçûnê kêm e.
7. Amûr bi tevahî bi servo-ajotinê ne. Hildan û tevgera alî ya manipulatorê hemî ji hêla motorên servo yên bi hêz ve têne ajotin. Sîstema mekanîkî ya hildanê bi rêberên xêzikî ve hatî çêkirin, bi leza xebitandina bilez û rastbûna pozîsyonê ya bilind.
٨. Sîstema kontrolê ekrana destikê ya ١٠ înç a hawirdekirî bi pergala CNC ya jîr a kontrolkerek bernameya Omron bikar tîne. Modên xebitandina otomatîk û destî hene. Hemû mîheng, çavdêrîkirin û debugkirin dikarin bi destan li ser ekranê werin xebitandin, ku ev zû û hêsan e.
9. Jîngeha xebatê ya vê makîneyê divê li gorî şertên germahiya -10-45℃, şilbûna nisbî ya kêmtir ji %80, bê madeyên şewatbar û teqîner, destwerdana elektromagnetîk a bihêz, bê gazên korozîf, bê şilavên şilavê, û ronîkirineke baş a jîngeha hundir be.
Pêşgotina Bikaranînê
1. Bikarhêner dikare bi karanîna ekrana destikê li gorî şert û mercên xebatê yên cûda di navbera moda barkirina otomatîk û moda barkirina destî de biguherîne.
2. Rêbaza barkirinê: Ji bo vekirinê çengala materyalê ya parçekirî ya jêrîn bikar bînin, û kasa vakûmê ya hundurîn plakayê dikişîne. Şafta rakirinê tê rakirin û bi awayekî horizontî ber bi makîneya lazerê ve tê veguheztin da ku plakayê li ser platforma lazerê bicîh bike.
3. Rêbaza daxistina materyalê avahiyek çengala ducarî ya çep û rast a elektrîkî bikar tîne. Çenga daxistina materyalê mesafeya ajotinê kurt e û rêjeya têkçûnê kêm e. Çenga vekirin û girtinê diranên çengalê yên lûleya çargoşe ya pola bikar tîne, ku xwedan kapasîteya hilgirtina barekî mezin û şiyana dij-deformasyonê ya bihêz e. Qada têkiliyê ya di navbera çenga materyalê û plakayê de piçûk e û plakayê naxurîne. Çenga ducarî di her du aliyan de li ser rêhesina rêber a xêzikî bi hev re vedibe û digire û ji hêla motorek frena elektromagnetîk ve tê ajotin.
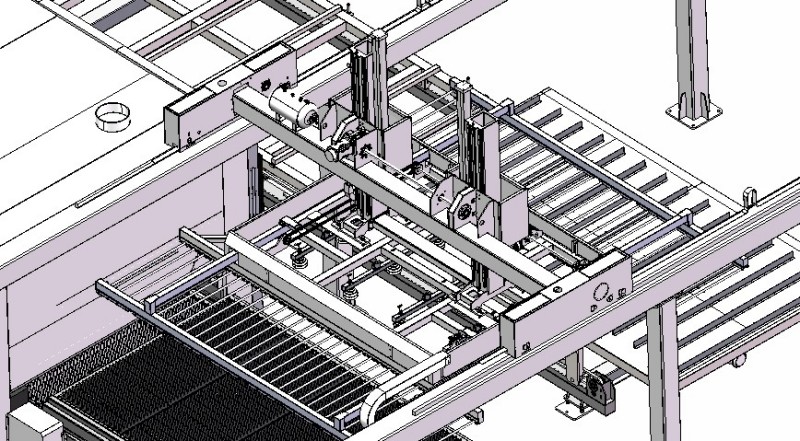
4. Laşê manipulatorê barkirin û daxistinê ji lûleya pola ya manganez û plakaya pola ya bi kalîte bilind hatiye çêkirin, ku bi tevahî têne qelandin û dûv re bi kêmkirina stresa lerzînê têne dermankirin, û ji hêla makîneya frezkirina gantry ya CNC ya mezin ve têne hilberandin. Ew xwedan hişkbûnek baş û rastbûnek bilind e. Tîrêja gantry û ling bi boltên verastkirinê ve têne girêdan, ku ji bo verastkirina horizontalîteya tîrêja gantry hêsan e. Manîpulatora barkirin û daxistinê ji hêla motorek servo ve bi rêya kêmkerek rastîn ve tê ajotin û bi rêlên rêberiya xêzikî yên hawirdekirî ve hatî çêkirin. Mekanîzmaya rakirinê bi silindirek hevsengkirina senkron ve hatî çêkirin da ku aramiya rakirina bilez baştir bike û ji pirsgirêkên lerzînê di dema tevgera mekanîzmaya rakirinê de dûr bikeve.
Nexşeya bandorê û Nexşeya xêzkirina pîvanî




Bernameyên amadekirina sazkirina alavan
1. Ji bo girêdana cîhazê, dabînkerê hêzê yê 380V60A û kabloyek hêzê ya 5-devkî ya 10mm² amade bikin.
2. Çavkaniya hewaya pêçayî bi zexta xebatê ya 0.6MPa û lûleya hewayê ya bi alavan ve girêdayî.
٣. Li qada xebatê ya alavan nîşanên hişyariyê yên ewlehiyê û prosedurên xebitandinê bicîh bikin.
Tedbîrên ewlehiyê
1. Qedexe ye ku operator bikevin qada xebatê ya alavên mobîl di nav rêza xebatê de;
٢. Pêdivî ye ku karmendên ku dikevin qada kar perwerdehiya ewlehiyê bibînin;
٣.Berî xebitandina robotê, divê hûn piştrast bikin ka şert û mercên xebitandinê têne bicîhanîn an na.
Xizmetkar
---Xizmeta Pêş-Firotinê:
Şêwirmendiya Berî Firotanê ya Belaş / Nimûneya Belaş a Larking
REZES Laser 12 demjimêr bersiva pêş-firotanê ya bilez û şêwirmendiya belaş pêşkêşî dike, Her cûre piştgiriya teknîkî heye
ji bo bikarhêneran peyda dibe.
Çêkirina Nimûneya Belaş heye.
Testkirina Nimûneya Belaş heye.
Em ji hemî belavker û bikarhêneran re sêwirana çareseriya pêşkeftî pêşkêş dikin.
---Xizmetên piştî firotanê:
Garantiya 1.3 salan ji bo makîneya qutkirina lazerê fîberê
2. Piştgiriya teknîkî ya tevahî bi e-name, bang û vîdyoyê
3. Parastina û dabînkirina parçeyên yedek ên jiyanê.
4. Sêwirana belaş a amûran wekî xerîdaran hewce dike.
5. Sazkirin û xebitandina perwerdehiya belaş ji bo karmendan.
Pirsên Pir tên Pirsîn
1. Pirs: Çima divê em we hilbijêrin?
A: Heke hûn me hilbijêrin, hûn ê kalîteya bilind, karûbarê çêtirîn, bihayê maqûl û garantiya pêbawer bistînin.
2.Q: Ez bi makîneyê nizanim, ez çawa hilbijêrim?
A: Tenê materyal, stûrî û mezinahiya xebatê ji me re bêjin, ez ê makîneya guncan pêşniyar bikim.
3. Çawa makîneyê bikar bînin?
A: Em ê destûra îngilîzî û vîdyoyê bi makîneyê re ji we re radest bikin. Ger hûn hîn jî hewceyê alîkariya me ya din bin, ji kerema xwe bi me re têkilî daynin.
4.Q: Ma ez dikarim nimûneyê bistînim da ku kalîteya makîneyê kontrol bikim?
A: Bê guman. Ji kerema xwe logo an sêwirana xwe ji me re peyda bikin, nimûneyên belaş dikarin ji bo we werin peyda kirin.
5.Q: Ma makîne dikare li gorî hewcedariyên min were xweşkirin?
A: Belê, tîmeke me ya teknîkî ya bihêz û ezmûneke me ya dewlemend heye. Armanca me ew e ku hûn razî bibin.
6.Q: Ma hûn dikarin ji bo me barkirinê saz bikin?
A: Bê guman. Em dikarin ji bo xerîdarên xwe barkirinê bi rêya deryayî û hewayî li gorî wê saz bikin. Mercên bazirganiyê FOB, ClF, CFR hene.
-

Makîneya qutkirina lazerê ya fîberê ya rastbûna bilind ...
-

Makîneya Qutkirina Lazerê ya Bergê Tevahî
-

Makîneya Birîna Lazerê ya Fîbera Metalê bi Guhertinê...
-
Makîneya Birîna Lazerê ya Lûleyên Metal û Boriyê
-

Bi arzanî Lûleyên Metal û Lûleyên Fîber Laser Cutting ...
-
Pelê Pola Full Cover qutkirina lazer a fîberê Metal ...




